
こんにちは、研究開発部の新井です。
一見すると関係のなさそうな「ラッコの食事」と「ロボットでのバリ取り」ですが、両者には「持ち方」という共通の構造があります。
今回は、その共通点からロボットバリ取りの把持方式を読み解いていきます。
ラッコは海の中で道具を使う、数少ない哺乳類のひとつです。
彼らは食事の際、貝を海底で拾い、石を使って貝の殻を割ります。
興味深いのは、そのときラッコが手に持っているのが「貝」であるという点です。
石という道具を手に持って叩くわけではなく、対象物である貝のほうを動かして腹の上に固定した石に当てるのです。
つまり、「道具を固定し、対象物を持つ」スタイルです。
一方で、人が貝を開けるときの動作はラッコとは正反対と言えるでしょう。
例えば、牡蠣やホタテを開ける時を想像してください。私たちは貝を利き手でない方で固定し、
ナイフなどの道具を利き手で握り、器用に操作することで殻をあけます。
つまり、「道具を持ち、対象物を固定する」スタイルです。
したがって、貝を開けるという目的は同じでも、持つものが違うのです。


なぜラッコと人間で持つものが異なるのでしょうか。その理由は科学的に証明されてはいません。
しかし、推測できる理由として、それぞれがおかれている作業環境と制約条件に違いがあるといえます。
ラッコの作業環境は「海の上」です。
海面に浮かびながら食事をするラッコは、常に波の揺らぎや浮力による不安定さという制約を受けています。
このような条件下では、重い石を振り下ろす動作は制御が難しいため、むしろ腹の上に安定した石を置き、
軽く扱いやすい貝を動かすほうが合理的です。
作業環境の不安定さと、扱える質量・力の制約が「貝を持つ」という行動を選ばせていると考えられます。

一方、人間の作業環境は「陸上」です。
そのため、安定して対象物を固定できます。また、人は手先で道具を細かく動かすことが可能です。
よって、道具を持って作業するほうが精度・自由度ともに高くなり、効率良く貝を開けることができます。
したがって、安定した作業環境と、手の器用さという条件が、人間に「道具を持つ」方法を選ばせているといえます。

このように、ラッコと人では置かれた作業環境と制約条件がまったく異なるため、貝を開けるという同じ目的でも、
持つものの最適解が変わってくるのではないでしょうか。
ここで「貝=ワーク」「貝を開ける道具=ツール」と置き換えると、
「貝を食べる際のラッコと人の行動の違いって、ロボットでのバリ取りにおけるワーク把持とツール把持に似ている!」
と気づきました。
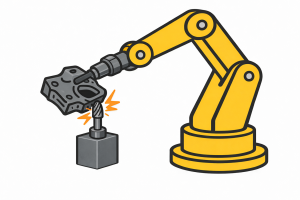
まず、ロボットでのバリ取りにおけるワーク把持とツール把持を解説します。
ラッコのスタイルと同じように、ロボットがワークを持ち、外部に固定されたバリ取りツールに当てて加工する方法です。
ワーク把持には次のような特徴があります。
・ ツールが外部にあるため、多様なツールや出力が高いツールを使える
・ バリ取り工程とハンドリングなど、複数のロボット作業を兼用できる
・ ワークの重量はロボット可搬重量により制限される
・ ワーク固定のために把持ハンドに工夫が必要で、多品種対応の場合はハンド交換が必要になる
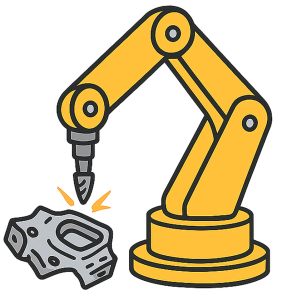
人のスタイルと同じように、ロボットがバリ取りツールを持ち、外部に治具で固定されたワークに当てて加工する方式です。
ツール把持には次のような特徴があります。
・ ワークの重量に制限がない
・ ワークは治具で固定すればよく、治具交換により多品種対応が可能
・ ロボット可搬重量に応じてツールの大きさは制限される
・ 多様なツールを使用するためにはATC(オートマチックツールチェンジャー)が必要
ラッコが貝を持つのも、人がナイフを持つのも、それぞれが置かれた作業環境や制約条件に合わせた最適解を選んでいるだけです。
これは、ロボットでのバリ取りにおいても同じで、作業環境や制約条件によって最適な把持方式は変わります。
・ ワークの大きさ・重量
・ バリ取りに必要な加工量や負荷
・ ワーク形状やバリの発生位置
・ 生産品種数・タクトタイム・前後工程
・ 既存設備やロボット設置スペース
上記は一部に過ぎませんが、これらを考慮した上でロボットでのバリ取りシステムを構築する必要があります。
ここで、どちらの把持方式を選んだとしても、ひとつだけ共通して言えることがあります。
それは、「バリ取りには必ずツールが必要である」ということです。
その選択肢のひとつとして、XEBECブラシ 表面用はロボットバリ取りにおいて非常に有効なツールです。
理由は、ブラシ構造ならではの「許容力の広さ」にあります。
切削工具や砥石のような剛性の高い工具では、ロボットの位置を厳密にティーチングしなければ、削り過ぎや当たり不足が発生してしまいます。
一方、XEBECブラシ 表面用は線材がしなやかにたわむため、多少の位置ズレや角度の違いがあっても加工状態を吸収してくれます。
その結果、ロボットのティーチングを過度に追い込む必要がなく、比較的ラフな設定でも安定したバリ取りが可能になります。
ラッコと人の違いが示すように、重要なのはどちらの方式が正しいかではなく、自分たちの作業環境や制約条件をどう捉えるかです。
ロボットでのバリ取りを検討する際も、まずは全体の構成を俯瞰し、何を固定し、何を動かすのかという視点から考えることが出発点になるのではないでしょうか。
ここまで、ロボットバリ取りにおけるワーク把持方式とツール把持方式について見てきましたが、
実際のバリ取りでは、把持方式だけでなく、ワーク形状、バリの発生位置、加工負荷、ロボットの姿勢、ツールの当て方など、
複数の要素を組み合わせて考える必要があります。
文章や図だけではイメージしにくい部分もあるため、ロボットバリ取りを検討する際には、実際の動きや加工状態を確認することが有効です。
ジーベックテクノロジーは、2026年6月11日(木)〜13日(土)に愛知で開催される
「ロボットテクノロジージャパン2026」
へ出展し、三井物産マシンテックとのコラボによる、ロボットバリ取りデモを実演いたします。
![]()
会場では、「XEBECブラシ 表面用」と「XEBEC裏バリカッター」を使用し、ロボットによるバリ取り加工を実際にご覧いただけます。
ロボットでのバリ取り自動化をご検討中の方は、把持方式やツール選定を考えるきっかけとして、ぜひご活用ください。
出展内容については、別途NEWSリリースでもご案内しております。
ロボットテクノロジージャパン2026
会期:2026年6月11日(木)〜13日(土)
小間位置:D-30
▶︎出展詳細情報はコチラをご覧ください
みなさまのご来場、心よりお待ちしております!
無断での転載や使用は一切禁止します。
転載を希望する場合は、事前の連絡と許諾の取得をお願いします。
バリ取り自動化のご相談はこちら
